Návod na výrobu robota
Návod na výrobu robota
Návodů, jak postavit robota, či nějaké to solární vozítko, jsou české i zahraniční weby plné, jediné co mě vždy při jejich konstrukci chybělo, a občas i dost trápilo, byl postup a doporučení třeba na vhodný materiál, technologické postupy a další konstrukční překážky. Proto jsem se rozhodl popsat některé z postupů, které se mě osvědčily. V první řadě vás tímto článkem nechci nikterak navádět a říkat vám, že jen tyto postupy jsou dogmatem, kterým se musíte řídit, či nějak vám kázat že tohle či tohle je zrovna to nejlepší.
Když jsem poprvé začínal stavět svůj první model solárního robota, ono spíš se dá říci solárního vozítka. Snažil jsem se aby vypadalo HI-TECH. Používal jsem proto různé součástky z CD romek, magnetofounů, a videí. Pro pohled oka, krása, ale z hlediska funkčnosti nevyhovující. Model byl zbytečně moc těžký, neohrabaný, neměl žádnou statiku, a byl rád, když se vůbec pohnul z místa. Začal jsem proto postupně ubírat díl po dílu, a vozítka odlehčovat. V této době pro mě byl nejpoužívanějším materiálem pro stavbu plech, duralové profily, těžkopádné motorky z kazeťáků a další bastlíři odpusť: dílenské havěti.
Jako první materiál, který by mohl být víc než vhodný, mě padl do ruky měděný drát označovaný jako Cu 1,5. Výhodou tohoto materiálu je jeho tvárnost a s tou jde ruku v ruce kreativita, kterou můžete uplatnit při modelování nejrůznějších tvarů. A tak vznikl první model.
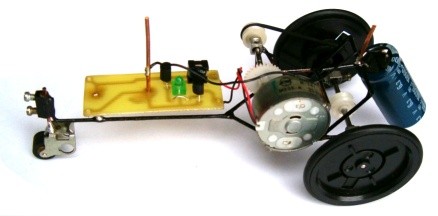
Jeho bezesporu velikou výhodou je dobrý a silný převod, který byl utvořen pomocí několika ozubených koleček a hřídelek. Nechci se chlubit, ale tento model již při minimálním osvětlení zdolává i ty nejtěžší terénní úpravy. Tento fakt je dobrý pro případ, že vozítko pošlete na planetu Mars, ale není vhodný, pokud s ním chcete soutěžit v soutěži o nejrychlejší model. Ale zpět ke konstrukci, jak je tedy patrné, celá konstrukce je velmi jednoduchá. Pomocí vnitřku z elektrikářské svorkovnice má udělané řízení směru, a pomocí AKR svorek má udělané úchyty na hřídelky. Posledním důležitým faktem jsou kolečka z CD-rom mechanik na kterých je navlečen O kroužek pro lepší adhesi. Elektronická část zůstala stejná jako v uveřejněném článku v sekci schémata.

Zde je další robot. A vznikl tak již rychlostně přijatelný model, pravdou zůstává, že použitý motorek není zrovna optimální tahoun, ani rychlík, ale dokáže vyžít i s velmi malou trochou elektrické energie. Celek vozítka byl navržen na maximální rozložení zátěže po celé jeho délce.
Zde je schéma jednoduchého obvodu robota:

Podvod
(Haha, 12. 11. 2010 11:08)